I didn’t read a forum post all the way through (or maybe I was just tired) and I accidentally responded to question about PWM; however the question was specifically about using the numerically controlled oscillator (NCO). I decided to take a look at this module and wrote some quick code. I also have been testing hardware for isolating PWM signals… so I married them together despite not being how I would use this in a real world application.
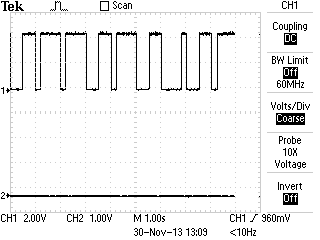
The NCO code worked great and was easy to set up. I used a simple loop to have it sweep a frequency… dumped the output of NCO1 (RC1) into a optoisolator which originally I was driving it way to fast… well unfortunately my isolation circuitry wasn’t quite up to the challenge of the speed but in the lower end of my sweep I got adequate results and ultimately the NCO test was very successful. While I was reading up on the NCO in the 16F1509 manual I started reading the configurable logic cell (CLC) module section. What a surprise to find this block in a 16F series microcontroller! The CLC is definitely going to get some more attention from me in the future. As always sample code follows below…

So the important stuff! The code written for the Microchip XC8 compiler:
No warrantee and don’t assume it’s free of bugs. It free to steal; enjoy. Code fix recommendations in the comments please.
Download: 16F1509_NCO.c
* File: main.c * Author: Charles M Douvier * Contact at: http://iradan.com * * * Target Device: * 16F1509 on Tautic 20 pin dev board * * Project: * * * Version: * 1.0 * */ #ifndef _XTAL_FREQ #define _XTAL_FREQ 4000000 //4Mhz FRC internal osc #define __delay_us(x) _delay((unsigned long)((x)*(_XTAL_FREQ/4000000.0))) #define __delay_ms(x) _delay((unsigned long)((x)*(_XTAL_FREQ/4000.0))) #endif
#include <xc.h> #include <stdio.h> #include <stdlib.h> #include <string.h>
//config bits #pragma config FOSC=INTOSC, WDTE=OFF, PWRTE=OFF, MCLRE=ON, CP=OFF, BOREN=ON, CLKOUTEN=OFF, IESO=OFF, FCMEN=OFF #pragma config WRT=OFF, STVREN=OFF, LVP=OFF
#define _XTAL_FREQ 4000000 //defined for delay
int count;
/*
*
*
*
* NCOxCON: NCOx CONTROL REGISTER
* bit 7 NxEN: NCOx Enable bit
* 1 = NCOx module is enabled
* 0 = NCOx module is disabled
* bit 6 NxOE: NCOx Output Enable bit
* 1 = NCOx output pin is enabled
* 0 = NCOx output pin is disabled
* bit 5 NxOUT: NCOx Output bit
* 1 = NCOx output is high
* 0 = NCOx output is low
* bit 4 NxPOL: NCOx Polarity bit
* 1 = NCOx output signal is active low (inverted)
* 0 = NCOx output signal is active high (non-inverted)
* bit 3-1 Unimplemented: Read as ‘0’
* bit 0 NxPFM: NCOx Pulse Frequency Mode bit
* 1 = NCOx operates in Pulse Frequency mode
* 0 = NCOx operates in Fixed Duty Cycle mode
*
* NCOxCLK: NCOx INPUT CLOCK CONTROL REGISTER
* bit 7-5 NxPWS<2:0>: NCOx Output Pulse Width Select bits(1, 2)
* 111 = 128 NCOx clock periods
* 110 = 64 NCOx clock periods
* 101 = 32 NCOx clock periods
* 100 = 16 NCOx clock periods
* 011 = 8 NCOx clock periods
* 010 = 4 NCOx clock periods
* 001 = 2 NCOx clock periods
* 000 = 1 NCOx clock periods
* bit 4-2 Unimplemented: Read as ‘0’
* bit 1-0 NxCKS<1:0>: NCOx Clock Source Select bits
* 11 = NCO1CLK pin
* 10 = LC1_out
* 01 = FOSC
* 00 = HFINTOSC (16 MHz)
* Note 1: NxPWS applies only when operating in Pulse Frequency mode.
* 2: If NCOx pulse width is greater than NCO_overflow period, operation is undeterminate.
*
*/
int main(void) {
// set up oscillator control register, using internal OSC at 4MHz.
OSCCONbits.IRCF = 0x0d; //set OSCCON IRCF bits to select OSC frequency 4MHz
OSCCONbits.SCS = 0x02; //set the SCS bits to select internal oscillator block
OPTION_REGbits.nWPUEN = 0; // enable weak pullups (each pin must be enabled individually)
TRISCbits.TRISC0 = 0; // output TRISCbits.TRISC1 = 0; // NCO1 TRISCbits.TRISC2 = 0; // output TRISCbits.TRISC3 = 0; // output TRISCbits.TRISC6 = 1; // input TRISCbits.TRISC7 = 1; // input
ANSELC = 0x00; // all port C pins are digital I/O
NCO1INCH = 0x00; // has to be set before INCL NCO1INCL = 0x4F; // low accumulator register
NCO1CLK = 0xE1; // 0xE1 = PW 128 clk 0x41 [010][000][01] 8 CLK PER, INT OSC, NCO1CON = 0xE1; // Enable, Ouput On, PWF Mode
count = 0;
while(1)
{
count = count+1; //just a little test code
if (count < 1) //LED didn't like the low freq
count=10;
NCO1INCH = 0x00; //has to be set before INCL
NCO1INCL = count;
__delay_ms(50);
}
return (EXIT_SUCCESS);
}